

Alabama Robotics Competition: Schedule<br />
The following represents the tentative schedule of the contest. Family members and teachers of participants are welcome to attend the opening discussion, competition rounds, and awards presentation.
|
9:30am-10:45am
10:45am-noon
Approximately Noon-2:30pm (contest will end at 2:30pm regardless of start time)
2:30pm-3:00pm
3:00pm-3:30pm
|
Memorial Dedication: Kaiden Crump (Woodland Forrest 2024 Team MVP)
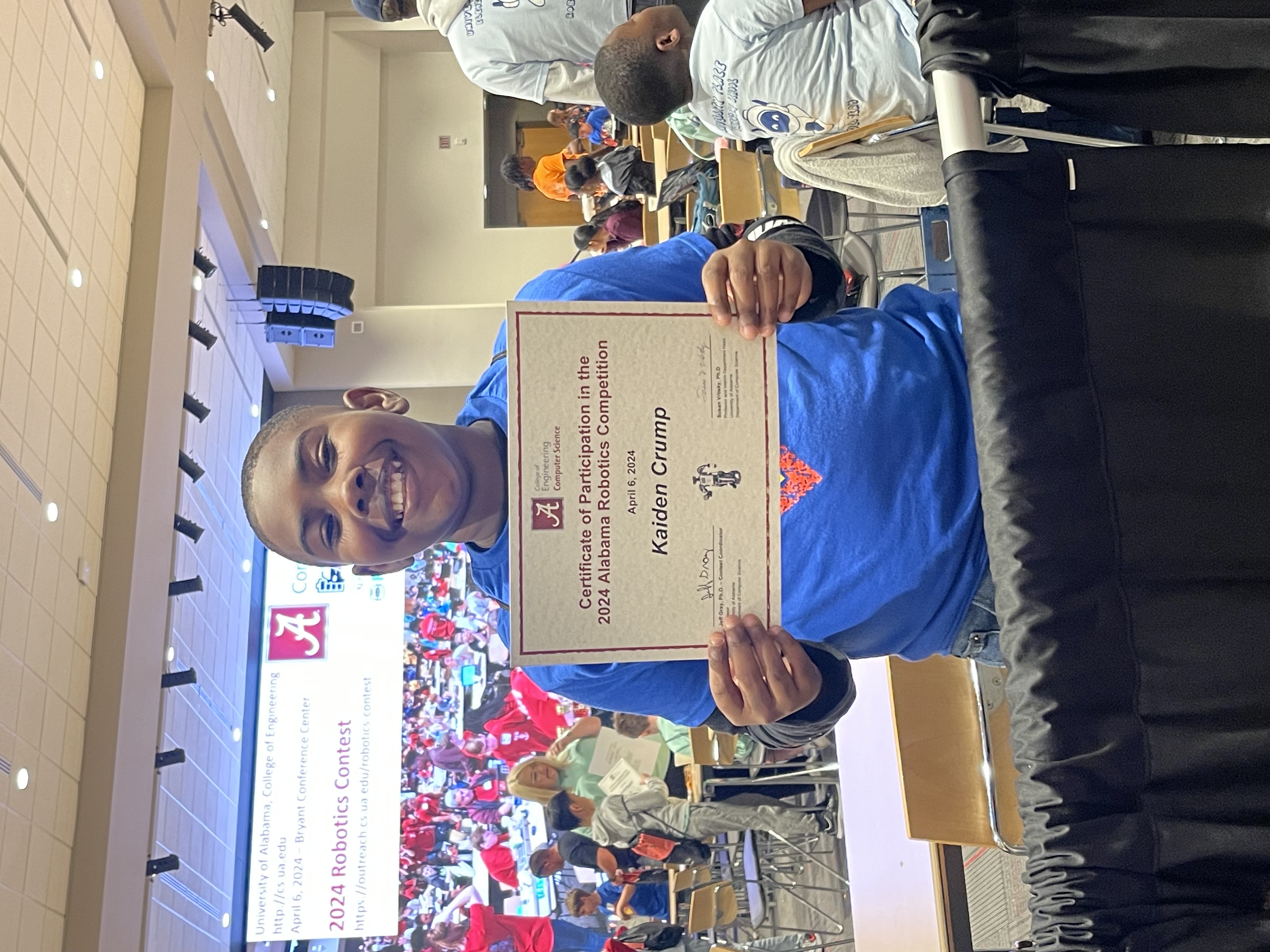
Kaiden Crump participated in our contest last year as a member of the Woodland Forrest Elementary team. We were saddened to learn last summer about Kaiden's passing. We were deeply touched to hear that the robotics contest was one of his favorite activities. When we saw the announcement about his passing, which included photos of Kaiden wearing the 2024 robotics tshirt, we knew we had to dedicate this year's contest in his memory!
Kaiden's family will be with us at our event. A special set of awards will be given in his honor...He loved Wing Stop and Subway, so we have a few gift cards to remember the passion that he brought to our contest last year!
To view a video of Kaiden at last year's contest, please click here.
Keynote Speaker: Josh Jones (CEO, QuantHub)

Demystifying AI: A Look at Past, Present, and Future
Josh Jones, CEO of QuantHub;
https://www.quanthub.com
An exploration of generative AI's recent advancements and their impact on business, industry, and education. This talk, accessible to non-technical audiences, examines how organizations can leverage AI to streamline processes, foster innovation, and maintain competitiveness in the digital landscape. Attendees will gain insights into AI trends across various sectors, understanding both challenges and opportunities presented by the AI revolution. The session provides valuable perspectives for individuals looking to navigate and harness the potential of AI-driven transformation in their professional and educational journeys.
BIO: Prior to his role at QuantHub, Josh Jones was founder and CEO of StrategyWise, an award-winning data science and AI consulting firm. StrategyWise provided data science strategy to global firms ranging from Samsung and Toshiba to Southern Company and Chick-Fil-A. StrategyWise was recognized as one of America’s fastest-growing companies three years in a row on the Inc 5000. A lifelong entrepreneur, Jones’s career experience has spanned 6 startups, 45 countries and 4 languages. He has been quoted by Forbes, CIO.com, the Atlanta Business Chronicle, and Entrepreneur Magazine, and is a TEDx alum and regular speaker and lecturer in universities and conferences across the US. Joshua received his Master of Business Administration at Emory University’s Goizueta Business School and his Bachelor of Science in Business Administration from the University of Alabama.